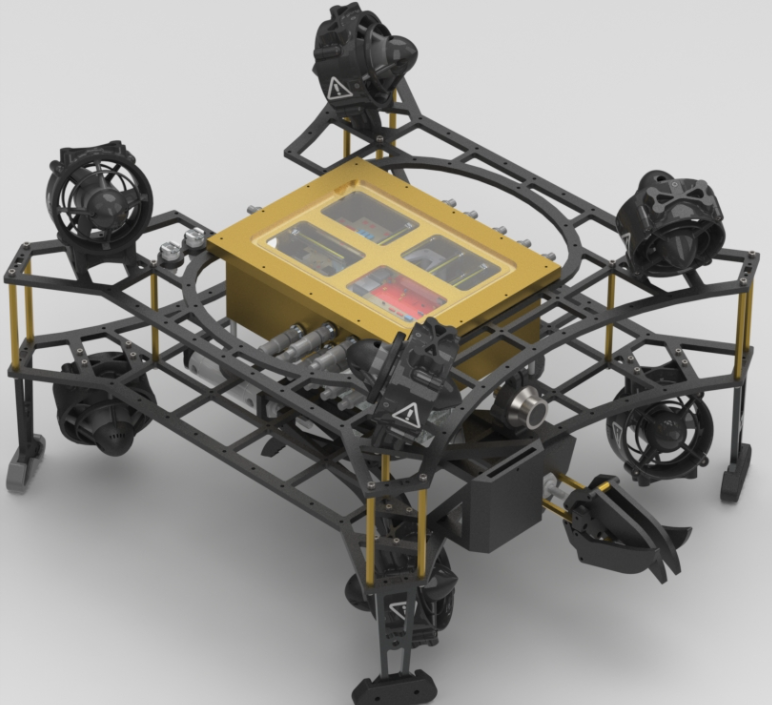
With the ROV, I coordinated through Github and Jira with a team of 6 developers to write control software for a fully 6 degree of freedom underwater rover for both teleoperated and autonomous control tasks. Built on the base of a Raspberry Pi and series of custom PCBs for sensing and power distribution the software I developed controlled 8 brushless thrusters to propel the vehicle through the water. This required building intrinsic models of the thrusters and working closely with mechanical designers to experimentally validate analytical models for key features of the vehicles such as center of drag, center of buoyancy and center of mass. Vital features for control-ability also required feedback from additional sensors like IMUs, pressure sensors, and computer vision pose information. The software I developed was written in C++ and Python using the Robot Operating System (ROS) architecture split between a surface control station and the master running on the Raspberry Pi.
X14 ROV